ECCV 2026连发3篇论文背后,群核科技想做物理AI“架桥人”|甲子光年

如何把物理世界转化为可训练、可交互、可评测的数字世界?
作者|王博
近期,欧洲计算机视觉顶级会议ECCV 2026公布论文录用结果,我们注意到一家中国公司的名字反复出现——群核科技。
这次群核科技共有三篇论文入选:Syn-GRPO讨论了训练数据如何在强化学习过程中持续生成和自我进化;SPEAR提出了一套面向具身智能研究的高保真仿真器,让机器在进入真实世界之前,先在数字世界里观察、行动、试错和学习;WalkerBench则是分析了模型的空间智能如何在更接近真实世界的交互任务中被更合理评测。
这三篇论文,实际上反映了群核科技关于物理AI基础设施建设的最新探索与思考:如何把物理世界转化为可训练、可交互、可评测的数字世界?
由此,群核科技的物理AI路线也变得更清晰。它并不仅是从数据服务商向“数据-仿真-评测”全链路延伸,更是在尝试把自己过去多年积累的数据和空间智能能力,转化为物理AI时代的底层基础设施。
这套基础设施的底座是群核科技沉淀的海量三维可交互数据,以及将物理世界数字化的能力;核心是结构化三维数据集和真实世界驱动的世界模型;面向的应用,则是具身智能、大模型、XR、工业孪生等需要空间理解和空间训练的物理AI场景。
当空间理解、仿真训练和持续学习能力成为物理AI新基建的要求,群核科技想扮演的角色,是连接物理世界与数字世界的“架桥人”。
1.为什么“架桥”

机器人行业最常讨论的问题是模型和本体。
一边是具身智能模型公司向视觉语言行动模型推进,试图让机器人拥有更强的理解、规划和泛化能力;另一边是机器人本体公司在降本、量产、供应链和场景落地上快速迭代。
但在训练一台真正能进入物理世界的机器人时,一个更基础的问题会提前出现:它在哪里学习?
就像人类学习需要书本、学校和考试一样,机器人学习也需要自己的“教材、训练场和考卷”:首先,它需要获得足够真实、足够结构化的训练数据;然后,它需要仿真环境进行低成本、高频次、可控的试错;最后,我们需要评测它是否真的理解了物理世界的空间。
这就是“架桥”的意义。
桥的一端是真实的物理世界。那里有家庭、商超、工厂、街道,有真实的空间结构、物体关系和长尾场景。
桥的另一端是虚拟的数字世界。真实空间需要被采集、重建、生成、标注和仿真,才能变成机器可以训练、交互和评测的数字资产。
而桥的价值,不只是把真实世界搬进数字空间,更关键的是,让模型在数字空间里训练出来的能力,最终能够回到真实世界。
这也被称为Real2Sim2Real闭环。
群核科技此次入选ECCV的三篇论文,恰好落在这座桥的几个关键位置。
Syn-GRPO回答的是“训练数据怎么持续生成”。强化学习训练多模态模型时,常见问题是数据质量下降、模型答案趋同、探索空间变窄。Syn-GRPO通过在线数据生成,让训练样本在过程中持续变化,避免模型只是在有限题库里“背题”。
SPEAR回答的是“训练场怎么建”。它提出了一套面向具身智能研究的高保真仿真器,把虚幻引擎生态里的高质量虚拟世界,变成可编程、可观测、可交互的训练环境。论文中,SPEAR开放超过1.4万个虚幻引擎原生接口,可以以56 FPS输出1080P照片级画面,并同步提供深度图、法线、语义分割、材质ID等多种传感器数据。
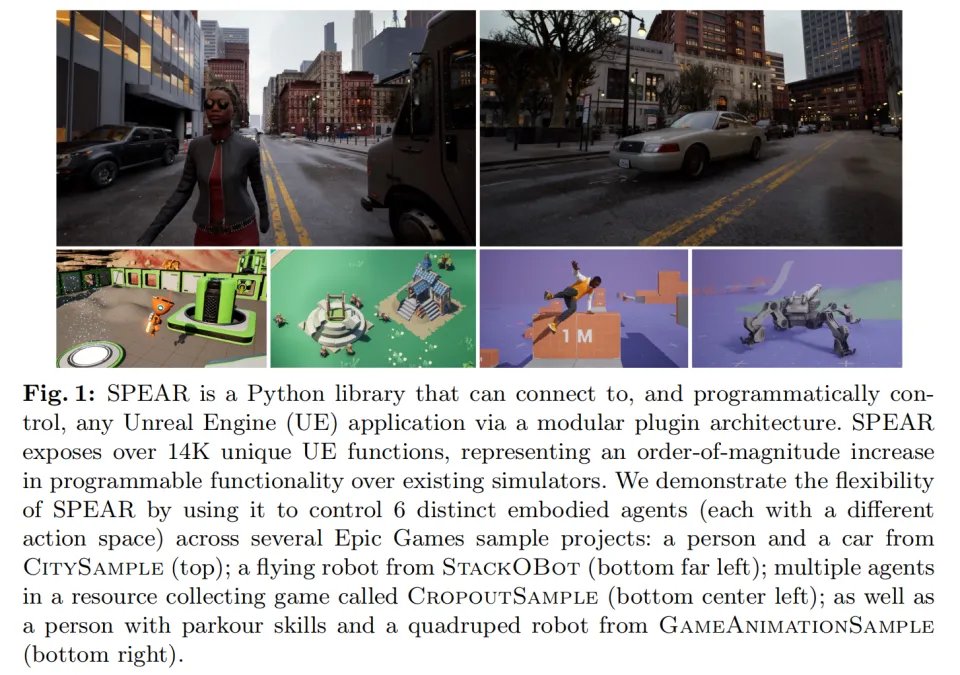
SPEAR论文,图片来源:ECCV
SPEAR的全称是Simulator for Photorealistic Embodied AI Research(面向真实感具身 AI 研究的仿真器)。它由群核科技、Adobe、英特尔、英伟达、ETH Zurich等公司或机构的研究者共同完成。
这篇论文的作者阵容本身就很有信号意义:German Ros是英伟达仿真生态系统开发总监,唐睿是群核科技首席科学家,Stefan Leutenegger是苏黎世联邦理工学院副教授,Kalyan Sunkavalli是Adobe Research首席科学家,Vladlen Koltun曾参与自动驾驶仿真基准CARLA的推出。
SPEAR论文作者,图片来源:ECCV
WalkerBench回答的是“空间能力怎么被评测出来”。它不再让模型只看一张图判断距离或方向,而是基于真实街景构建交互式评测任务,让模型像真实路人一样移动、观察、记忆和导航。
三篇论文分别对应“数据-仿真-评测”三个环节。它们共同说明,物理AI的竞争焦点正在发生变化:行业不仅需要更强的模型和本体,也需要一整套Real2Sim2Real的基础设施。
这套基础设施就是群核科技想架的桥。

制图:甲子光年
图片来源:Hugging Face